
変形型月面ロボット「LEV-2」(SORA-Q) ― 2025年04月11日 18時08分18秒
JAXA(宇宙航空研究開発機構)による日本の無人月面探査機・着陸機として、2024年1月20日に日本初となる月面への軟着陸を達成し、かつ史上初となるピンポイント着陸に成功した月着陸実証機「SLIM」。
超小型の変形型月面ロボット「LEV-2(Lunar Excursion Vehicle 2)」(愛称 SORA-Q)は「SLIM」に搭載され、着陸後は月面に降りて「SLIMU]本体や月面を撮影するなど、大活躍しました。
「SORA-Q」は、JAXA、タカラトミー、ソニーグループ、同志社大学が共同開発した小型月面探査ロボットで、同時に「SLIM」に搭載された「LEV-1」を経由してデータを地球に送信しました。
下の写真、SORA-Qが撮影した「傾いて月面着陸した SLIM」は当時大きな話題になりました。
4~5メートルほど離れた位置から撮影されたSLIMの姿、月面の様子と宇宙の空、そしてSORA-Q自身の車輪が1枚に収められています。

JAXAのXより。 © JAXA/タカラトミー/ソニーグループ(株)/同志社大学
「SORA-Q」の開発に当たっては、組立式駆動玩具の「ゾイド」シリーズ(1983年〜)や変形ロボットの「トランスフォーマー」(1984年〜)、二足歩行ヒューマノイド型ロボット「Omnibot 17μ i-SOBOT」(2007年)などで培ったタカラトミーの玩具開発のノウハウが活かされているということです。
そんな「SORA-Q」の原寸大モデルが「SORA-Q Flagship Model」としてタカラトミーから発売されていましたが、品薄状態が続いていました。
最近やっと市場に普通に出回るようになったみたいなので、購入してみました。税込27,500円です。
息子がタカラトミーの株主優待でかなり安く購入できるというので、15,000円払って息子にも少し負担させて買ってもらいました。
「SORA-Q」の外箱です。
")
箱の中の緩衝材にしっかりと包まれて、本体が収まっています。走行時の傷を防ぐホイールカバーと、その他付属品が緩衝材の下に入っていました。
")
自分のスマートフォンで操作します。「バタフライ走行」と「クロール走行」2種類の走行モードで走行することができ、前進、後進、右折、左折、自由自在です。
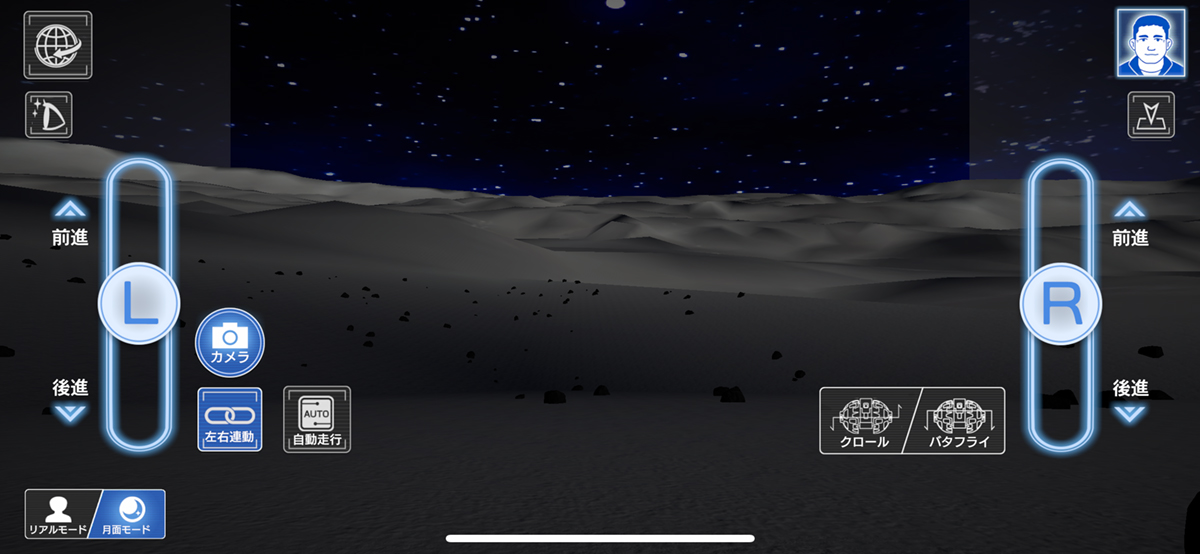
「月面モード」や「リアルモード」でカメラ撮影したり、イベントミッションをクリアしたりと、月面探査を楽しむことが出来ます。

月に行った「SORA-Q」と同じ大きさで、球体から月面ロボットに変形したり、走行機能も実機と同じ性能になっています。
")
")
ちょっとお高いおもちゃですが、これでしばらく遊べそうです。 楽しい❣
最後までご覧いただき、ありがとうございました。
コメント
トラックバック
このエントリのトラックバックURL: http://hoshino.asablo.jp/blog/2025/04/11/9767717/tb
※なお、送られたトラックバックはブログの管理者が確認するまで公開されません。
コメントをどうぞ
※メールアドレスとURLの入力は必須ではありません。 入力されたメールアドレスは記事に反映されず、ブログの管理者のみが参照できます。
※投稿には管理者が設定した質問に答える必要があります。